关于bfs、astar、dijkstra的个人理解
图搜索算法
本文将从图搜索算法的基本流程入手,层层递进地介绍几种图搜索算法。先从广度优先搜索(BFS)入手,接着再在此基础上去探讨Dijkstar和A*算法。
BFS:从各个方向上去对图进行搜索。
Dijkstar:引入了代价,在搜索的时候将会按照代价的等高线进行探索
A*:一种启发式搜索算法,其具体形式取决于启发函数,一般为欧氏距离或为曼哈顿距离。
表示地图
研究搜索算法的时候我们应该先理解数据是什么,在路径规划中,输入是图,而输出是从起始位置到目标位置的一组路径。
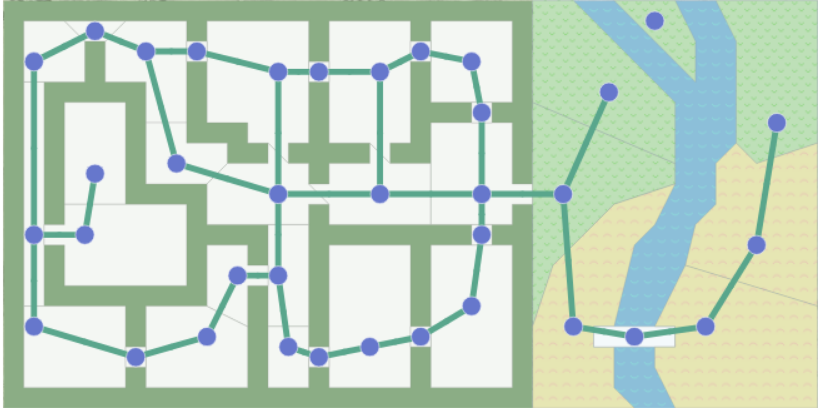
如图,这就是一个输入,一个图表,图表由节点和边组成,规划算法中只会告诉从一个节点到另一个节点的路径是什么,他不会知道怎么过去,怎么过去是由控制器决定的。
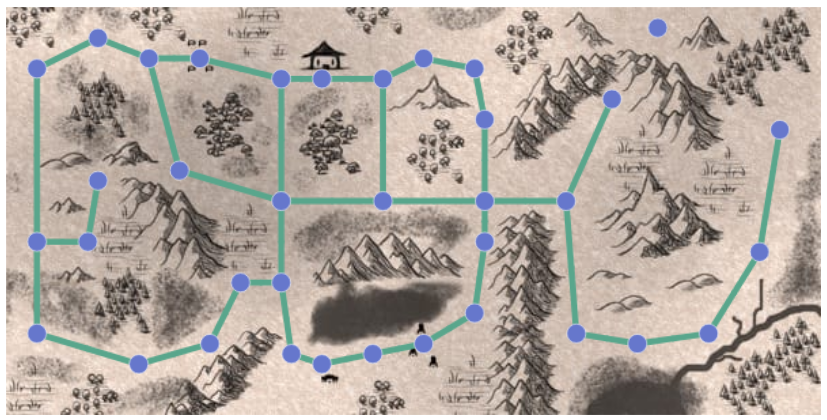
这两个图没有什么不同,可能在不同的地方,不同的比例,每个节点到每个节点的距离不一样,但抽象化为图后,他们所指向的是一个图,因为图只有节点和边两个属性,节点相同,边相同的图便为同一张图。
BFS
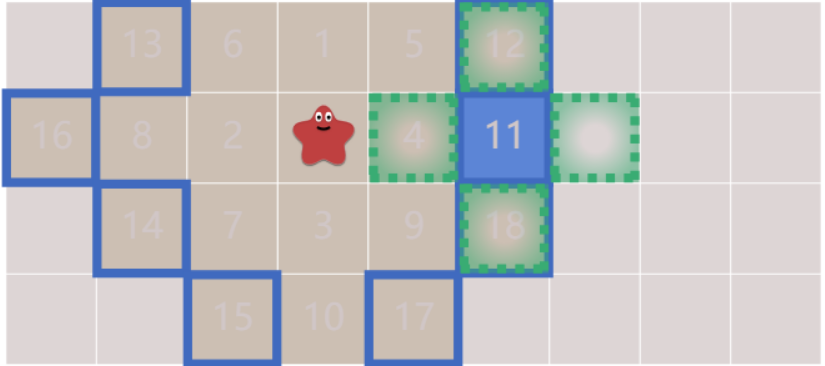
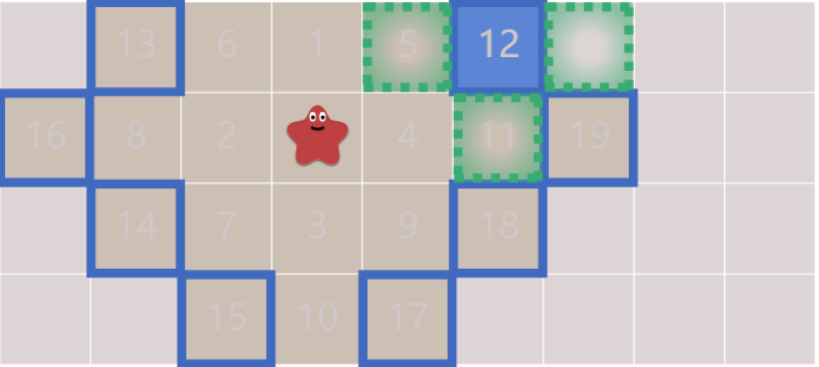
图搜索算法的根本思想是追踪一个$frontier$的队列,该队列包含其中的节点信息。
接下来我们循环进行以下操作直至$frontier$对列为空
(1)从边界中取出一个节点并删除它
(2)查找它的相邻节点,将$frontier$与$reached$(一个存储我们查找过的所有节点的集合)中没有的节点添加到$frontier$与$reached$中。
如下图
以下是BFS的核心代码(python)
1
2
3
4
5
6
7
8
9
10
frontier = Queue()#创建一个队列
frontier.put(start)#将start(上图中的星星)放入队列
reached = set()#创建一个集合
reached.add(start)#将start放入集合
while not frontier.empty():#循环直至frontier为空
current = frontier.get()#从frontier取出一个元素命其为current
for next in graph.neighbors(current):#选定一个current相邻的元素为next
if next not in reached:#如果next不足reached里边把next加入到frontier与reached里
frontier.put(next)
reached.add(next)
本文由作者按照 CC BY 4.0 进行授权